Part 1
DC Motor:
Two wire (power & ground), continuous rotation motors
Using pulse width modulation (PWM) to control the speed of DC
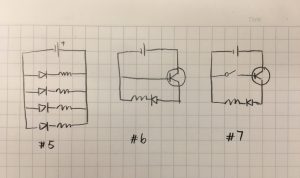
Stepper Motor:
Use multiple electromagnets around gear to divide a full rotation into equal steps.
Requires extra controller.
Servo Motor: Generally assembled by a DC motor, a gearing set, a control circuit and a position-sensor (so position can be controller precisely).
Usually three wires (power, ground, signal)
Using pulse width modulation (PWM) to control the signals of servomotors.
Part 2
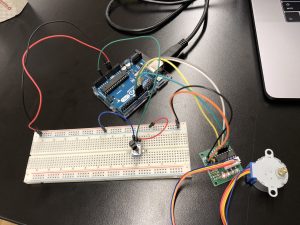
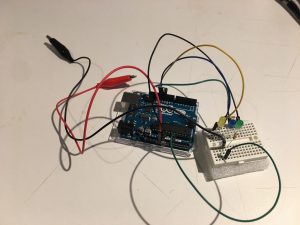
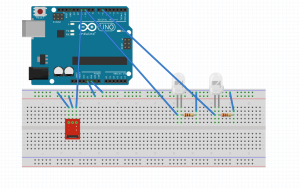
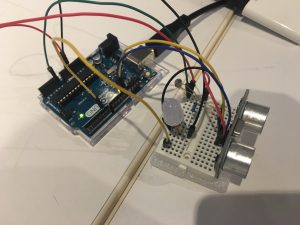
Use knob to control the speed of a stepper motor.
Core components
1* potentiometer
1* step motor
Wires & jumpwires
Arduino board
How it works
Use knob to control the speed of a stepper motor.
Problems
Can’t see the movement of stepper, though I can feel it changes.