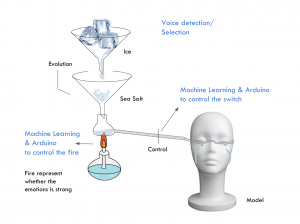
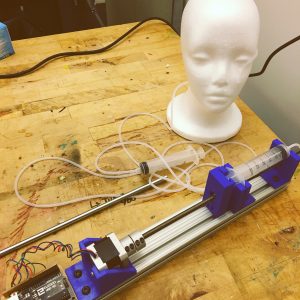
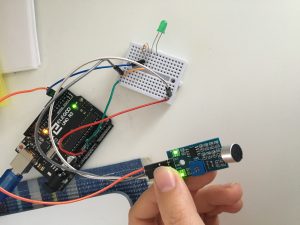
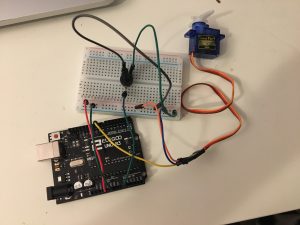
I want to use the potentiometer to control the servo motor. When the potentiometer rotates anticlockwise triggers the motor move.
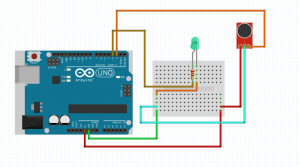
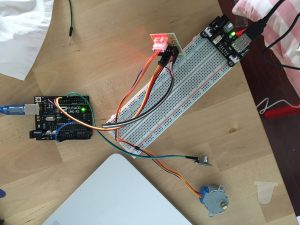
Core components
Potentiometer
Servo Motor
Wires & jump wires
Arduino board
Breadboard
Circuit
How it works
When the potentiometer rotates anticlockwise triggers the motor move. if the potentiometer rotates clockwise at max, the motor will stop.
Code
#include <Servo.h>
Servo myservo;
int potpin = A0;
int val; // variable to read the value from the analog pin
void setup() {
myservo.attach(9);
}
void loop() {
val = analogRead(potpin);
val = map(val, 0, 1023, 0, 180);
myservo.write(val);
delay(15);
}