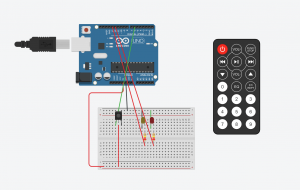
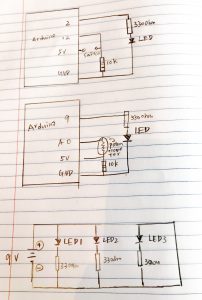
instruction for wireless assignment is to choose one of the wireless topics covered in class and put it to practice for use in everyday life. I chose IR Remote control as the topic I want to explore. I tried to use the remote control to control the two LEDs.
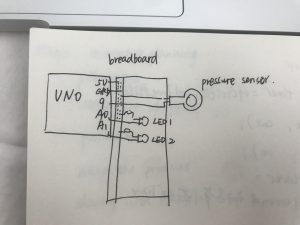
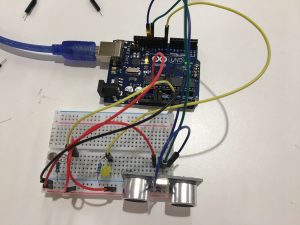
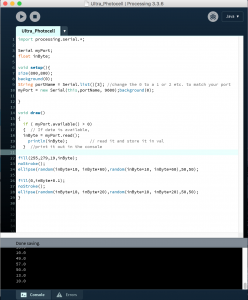
I want to create a use ultrasonic sensor and a photocell to send data and bytes to processing, that allows me create a sense of controlling nature force on digital screen.
Description:
The sum of sensor values from ultrasonic and photocell determines the opacity and position of particles inside the fog.
How it works: people use hands to move around the ultrasonic sensor and use finger to cover the amount of light through photocell to control the position and opacity of fog particles on screen
Problem:
The data sent from Arduino to Processing are within certain range which are hard to be calculated and mapped precisely into the Processing sketches. Also, the bytes are not stable. (Also, I forgot to write code for LED, but I think it does not matter that much)
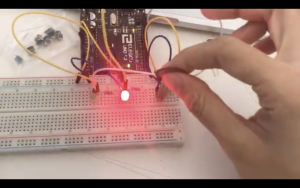
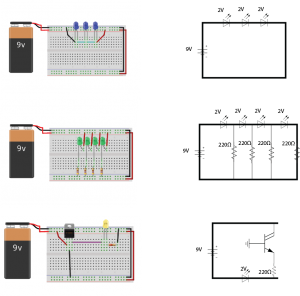
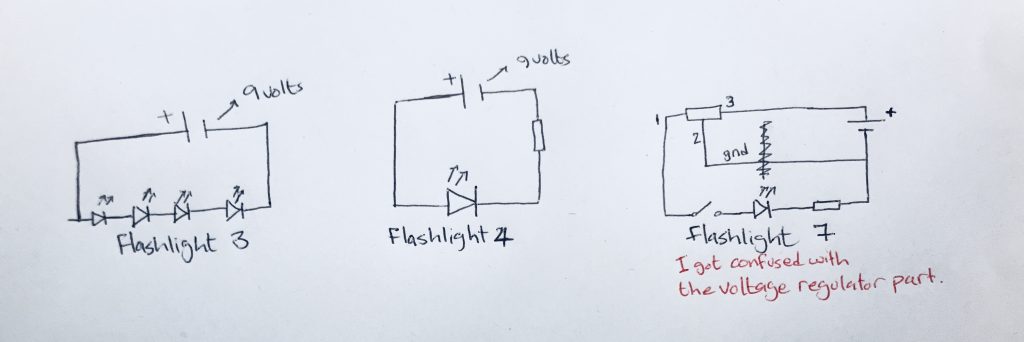
This week is the flashlight assignment which I start from connecting several LEDs with 9v battery and resistors. Then tried to use button and potentiometer to turn on and off of led lights. Attached are circuits and photo for these explorations.
Fish on Wheels is a very interesting Pcomp project invented by Dutch design collective Studio Diip. They added wheels and sensors to a fish tank so that its inhabitant can drive it by swimming in a certain direction. The tank itself was controlled by Arduino, and the main method used to detect fish’s movement is computer vision, with the camera on the top of the tank.
How it works – As the fish swims around the transparent tank, a webcam positioned above the water tracks its movements – detecting the contrast between the fish and the bottom of the tank – and relays them to the Arduino. Using programming to mimic the fish’s movements by driving the vehicle in the same direction.
I like this project because there is a goodwill behind it – “Our pet fish have always been limited to their water holding area known as ‘the fish tank’,” said Studio Diip, “In an attempt to liberate fish all over the world, the first self-driving car for fish has been developed.” Overall, the method used in this project is really simple but the outcome is humorous and inspiring.
CONCEPT: in this project, I would like to explore the difference between analog and digital photography and represent these two mediums as a different-colored eye or (Heterochromia) for a photographer. having the passion for both and how that affects the way a photographer sees the world. Continue reading →