
- Goal of the project and/or desired interaction
My main goal was to overcome a past frustration using the servo motor. Decision bot 1.0 aim is to help us make those daily complicated decisions such as: “Should I have another coffee?” or “Should I eat a cookie?”. (My roommates asked more interesting questions though).
- Quick description of assembly and list of core components
– 1x Arduino
– 1 x small breadboard.
– Servo motor
– Wires
– 1 Push button
- A box + paper + pen
- How it works
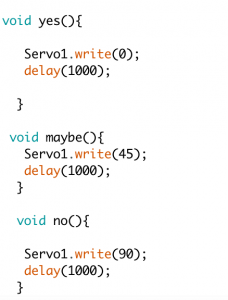
The mechanics behind the box are quite simple. I wanted a device able to give a random answer (YES, MAYBE,NO). After some testing, I decided to assign 3 different positions ( changing the servo angle) in order to get an accurate visual indicator (position arrow).
- Any problems you encountered and/or solved
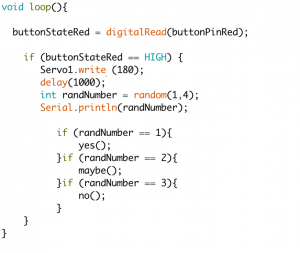
It took me a while to define the ideal positions for the servo. In addition I had to add a transition state ( Making decision–> over rotation) to avoid having some answers without any feedback when the randomized number was the same than the previous one.
- Images of your circuit
The circuit is simple, a button with a pull-up resistor, power and ground. Servo connected to power, ground and pin number 9.
- Code
https://github.com/Lywa/carla_molins_Pcomp/tree/master/decision_maker